5s
+1
Submission successful!




Metoda chłodzenia: chłodzenie powietrzem
Klasyfikacja stopni: IP54
Moc nominalna: 10 kW
Materiał ostrza: Stop aluminium
Rodzaj: Generator energii wiatrowej
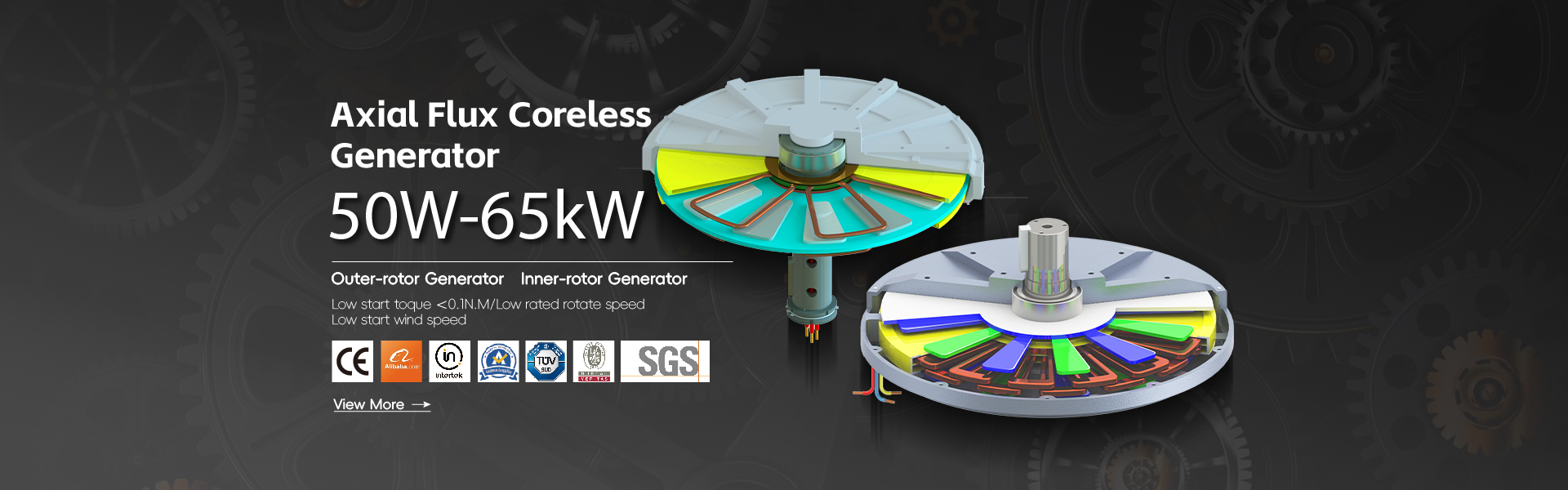
Moc nominalna: 300w-30kw
Uruchom moment obrotowy: < 0,3 N.M.
Znamionowe napięcie robocze: DC400V/DC240V
Znamionowa prędkość wiatru: 11,5 M/s
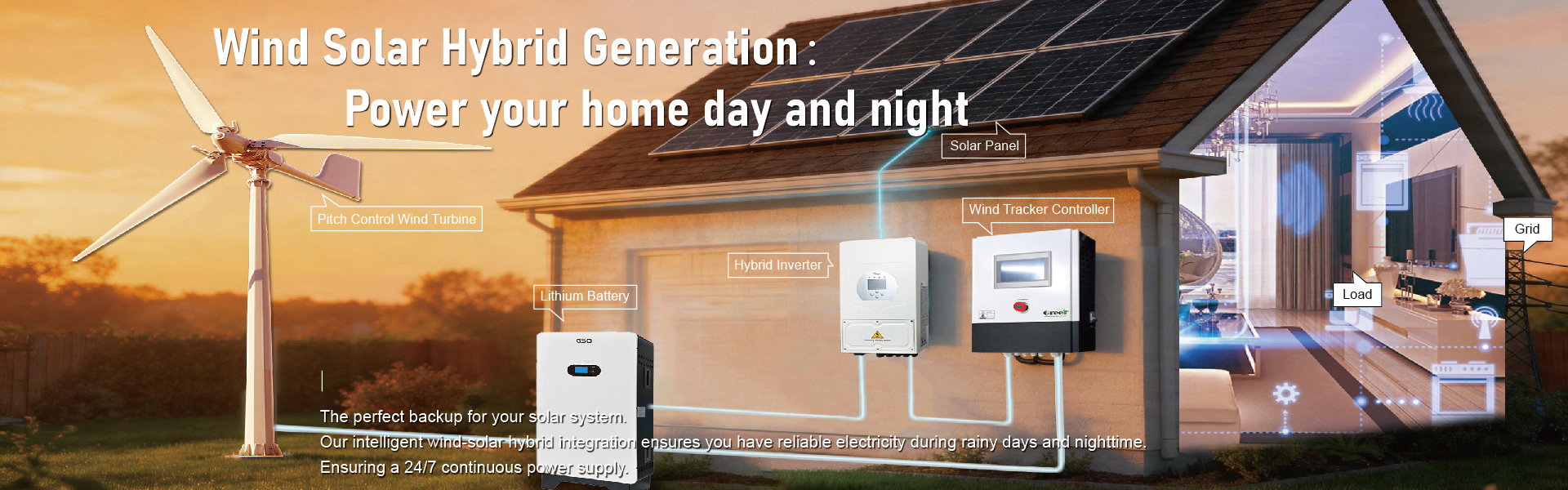
Nazwa produktu: Konwerter hybrydowy
Moc znamionowa (KW): 100kw/150kw/200kw/250kw/300kw/500kw/600kw/700kw/800kw/1000kw
Częstotliwość wyjściowa: 50 Hz / 60 Hz


 english
english
 français
français
 Deutsch
Deutsch
 Italiano
Italiano
 Русский
Русский
 Español
Español
 português
português
 Nederlandse
Nederlandse
 ελληνικά
ελληνικά
 日本語
日本語
 한국
한국
 العربية
العربية
 हिन्दी
हिन्दी
 Türkçe
Türkçe
 indonesia
indonesia
 tiếng Việt
tiếng Việt
 ไทย
ไทย
 বাংলা
বাংলা
 فارسی
فارسی
 polski
polski


